CARL DMC Environments¶
CARL includes the Finger, Fish, Quadruped and Walker environments from the DeepMind Control Suite. The context features control the MuJoCo physics engine, e.g. the floor friction.
CARL DMC Finger Environment¶
The agent needs to learn to spin an object using the finger.
Context Feature |
Default |
Bounds |
|---|---|---|
gravity |
-9.81 |
(-inf, -0.1, <class ‘float’>) |
friction_tangential |
1 |
(0, inf, <class ‘float’>) |
friction_torsional |
1 |
(0, inf, <class ‘float’>) |
friction_rolling |
1 |
(0, inf, <class ‘float’>) |
timestep |
0.004 |
(0.001, 0.1, <class ‘float’>) |
joint_damping |
1.0 |
(0, inf, <class ‘float’>) |
joint_stiffness |
0.0 |
(0, inf, <class ‘float’>) |
actuator_strength |
1 |
(0, inf, <class ‘float’>) |
density |
5000.0 |
(0, inf, <class ‘float’>) |
viscosity |
0.0 |
(0, inf, <class ‘float’>) |
geom_density |
1.0 |
(0, inf, <class ‘float’>) |
wind_x |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_y |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_z |
0.0 |
(-inf, inf, <class ‘float’>) |
limb_length_0 |
0.17 |
(0.01, 0.2, <class ‘float’>) |
limb_length_1 |
0.16 |
(0.01, 0.2, <class ‘float’>) |
spinner_radius |
0.04 |
(0.01, 0.05, <class ‘float’>) |
spinner_length |
0.18 |
(0.01, 0.4, <class ‘float’>) |
CARL DMC Fish Environment¶

In Fish, the agent needs to swim as a simulated fish.
Context Feature |
Default |
Bounds |
|---|---|---|
gravity |
-9.81 |
(-inf, -0.1, <class ‘float’>) |
friction_tangential |
1 |
(0, inf, <class ‘float’>) |
friction_torsional |
1 |
(0, inf, <class ‘float’>) |
friction_rolling |
1 |
(0, inf, <class ‘float’>) |
timestep |
0.004 |
(0.001, 0.1, <class ‘float’>) |
joint_damping |
1.0 |
(0, inf, <class ‘float’>) |
joint_stiffness |
0.0 |
(0, inf, <class ‘float’>) |
actuator_strength |
1 |
(0, inf, <class ‘float’>) |
density |
5000.0 |
(0, inf, <class ‘float’>) |
viscosity |
0.0 |
(0, inf, <class ‘float’>) |
geom_density |
1.0 |
(0, inf, <class ‘float’>) |
wind_x |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_y |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_z |
0.0 |
(-inf, inf, <class ‘float’>) |
CARL DMC Quadruped Environment¶
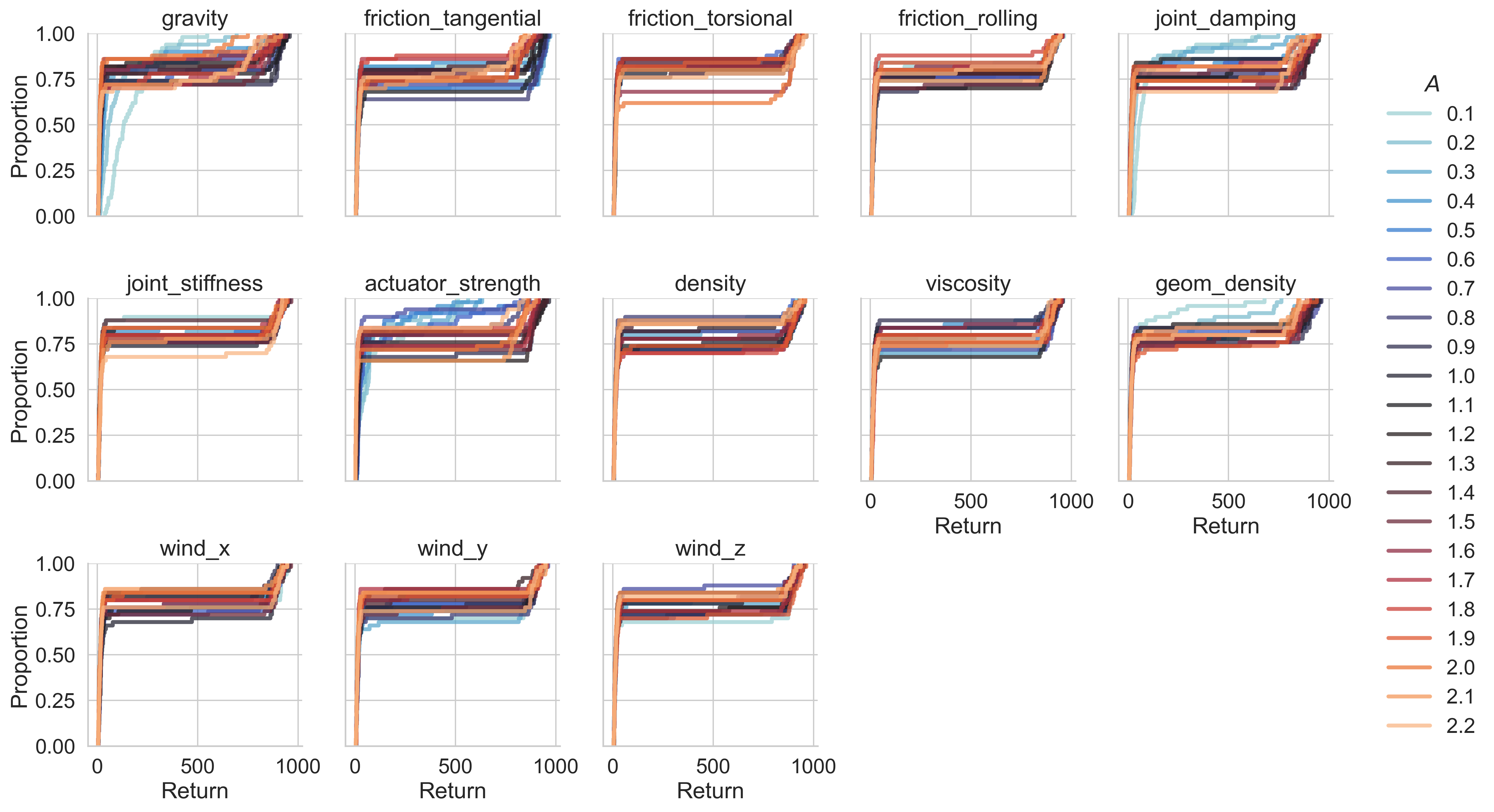
The agent’s goal is to walk efficiently with the quadruped robot. Influence of context settings on an agent trained on the default environment:
Context Feature |
Default |
Bounds |
|---|---|---|
gravity |
-9.81 |
(-inf, -0.1, <class ‘float’>) |
friction_tangential |
1 |
(0, inf, <class ‘float’>) |
friction_torsional |
1 |
(0, inf, <class ‘float’>) |
friction_rolling |
1 |
(0, inf, <class ‘float’>) |
timestep |
0.005 |
(0.001, 0.1, <class ‘float’>) |
joint_damping |
1.0 |
(0, inf, <class ‘float’>) |
joint_stiffness |
0.0 |
(0, inf, <class ‘float’>) |
actuator_strength |
1 |
(0, inf, <class ‘float’>) |
density |
0.0 |
(0, inf, <class ‘float’>) |
viscosity |
0.0 |
(0, inf, <class ‘float’>) |
geom_density |
1.0 |
(0, inf, <class ‘float’>) |
wind_x |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_y |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_z |
0.0 |
(-inf, inf, <class ‘float’>) |
CARL DMC Walker Environment¶

The walker robot is supposed to move forward as fast as possible. Influence of context settings on an agent trained on the default environment:

Context Feature |
Default |
Bounds |
|---|---|---|
gravity |
-9.81 |
(-inf, -0.1, <class ‘float’>) |
friction_tangential |
1 |
(0, inf, <class ‘float’>) |
friction_torsional |
1 |
(0, inf, <class ‘float’>) |
friction_rolling |
1 |
(0, inf, <class ‘float’>) |
timestep |
0.0025 |
(0.001, 0.1, <class ‘float’>) |
joint_damping |
1.0 |
(0, inf, <class ‘float’>) |
joint_stiffness |
0.0 |
(0, inf, <class ‘float’>) |
actuator_strength |
1 |
(0, inf, <class ‘float’>) |
density |
5000.0 |
(0, inf, <class ‘float’>) |
viscosity |
0.0 |
(0, inf, <class ‘float’>) |
geom_density |
1.0 |
(0, inf, <class ‘float’>) |
wind_x |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_y |
0.0 |
(-inf, inf, <class ‘float’>) |
wind_z |
0.0 |
(-inf, inf, <class ‘float’>) |