CARL Box 2D Environments¶
OpenAI’s gym Box2D provides environments for continuous control tasks. In CARL BipedalWalker, LunarLander and CarRacing are included, each with their own modification possibilities like new vehicles to race.
CARL BipedalWalker Environment¶
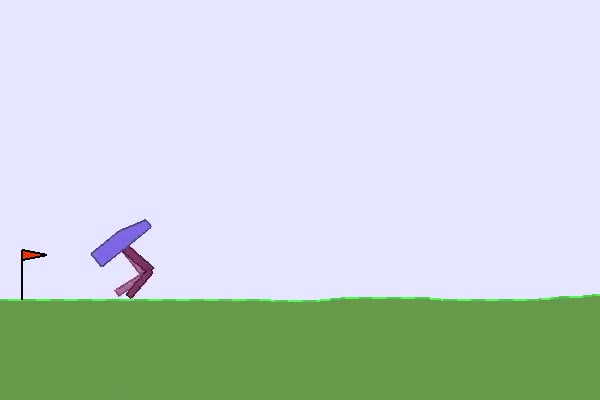
In BipedalWalker a bipedal robot is trained to walk. The properties of the walker’s body, surroundings and physics as well as the simulation dynamics can be varied via the context features.
Context Feature |
Default |
Bounds |
|---|---|---|
FPS |
50.0 |
(1, 500, <class ‘float’>) |
SCALE |
30.0 |
(1, 100, <class ‘float’>) |
GRAVITY_X |
0.0 |
(-20, 20, <class ‘float’>) |
GRAVITY_Y |
-10.0 |
(-20, -0.01, <class ‘float’>) |
FRICTION |
2.5 |
(0, 10, <class ‘float’>) |
TERRAIN_STEP |
0.4666666666666667 |
(0.25, 1, <class ‘float’>) |
TERRAIN_LENGTH |
200.0 |
(100, 500, <class ‘int’>) |
TERRAIN_HEIGHT |
5.0 |
(3, 10, <class ‘float’>) |
TERRAIN_GRASS |
10.0 |
(5, 15, <class ‘int’>) |
TERRAIN_STARTPAD |
20.0 |
(10, 30, <class ‘int’>) |
MOTORS_TORQUE |
80.0 |
(0, 200, <class ‘float’>) |
SPEED_HIP |
4.0 |
(1e-06, 15, <class ‘float’>) |
SPEED_KNEE |
6.0 |
(1e-06, 15, <class ‘float’>) |
LIDAR_RANGE |
5.333333333333333 |
(0.5, 20, <class ‘float’>) |
LEG_DOWN |
-0.26666666666666666 |
(-2, -0.25, <class ‘float’>) |
LEG_W |
0.26666666666666666 |
(0.25, 0.5, <class ‘float’>) |
LEG_H |
1.1333333333333333 |
(0.25, 2, <class ‘float’>) |
INITIAL_RANDOM |
5.0 |
(0, 50, <class ‘float’>) |
VIEWPORT_W |
600.0 |
(400, 1000, <class ‘int’>) |
VIEWPORT_H |
400.0 |
(200, 800, <class ‘int’>) |
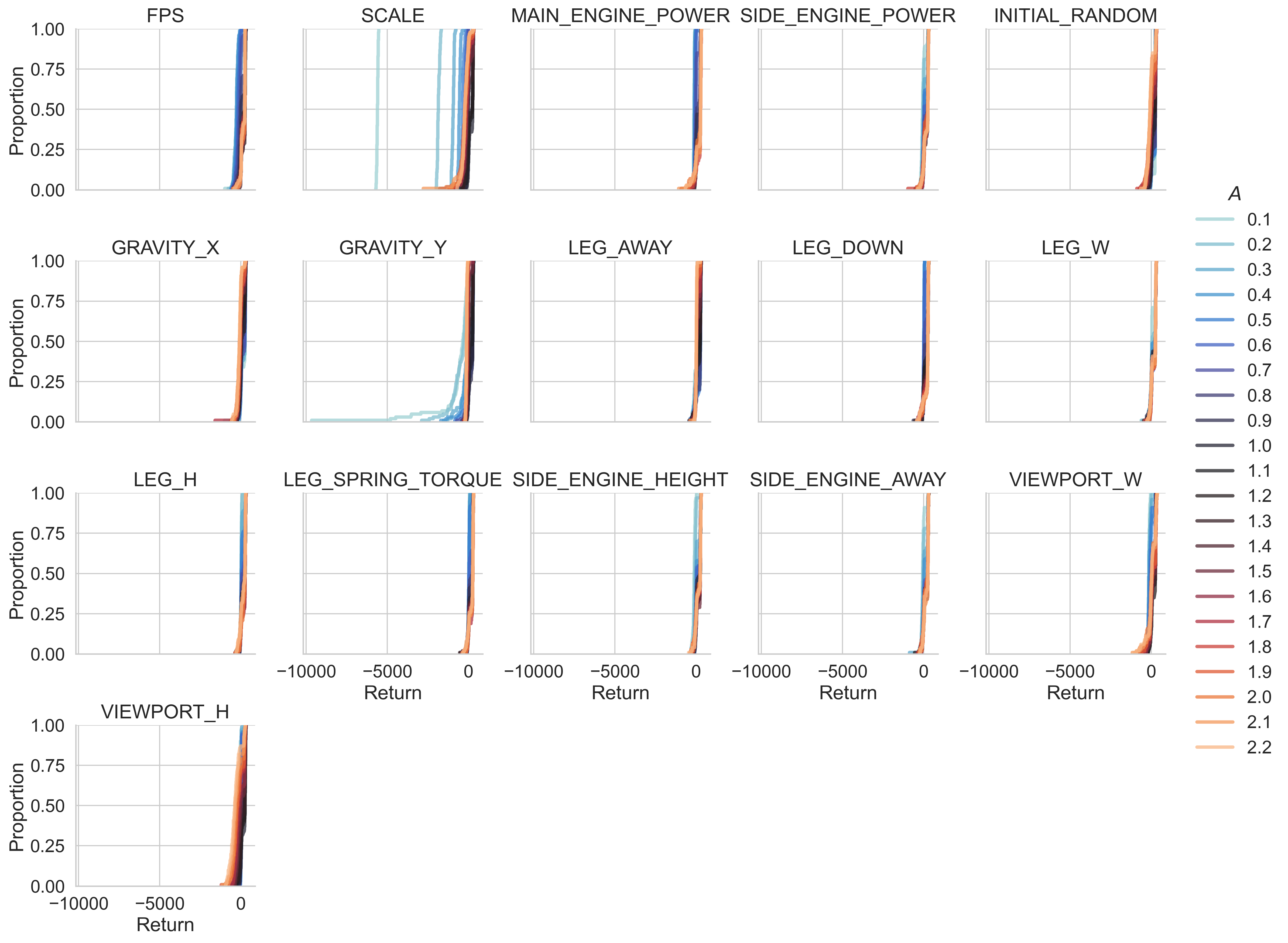
CARL LunarLander Environment¶
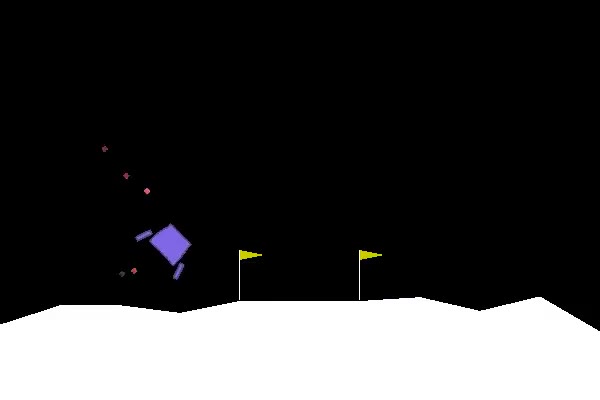
Here, the lunar lander should be safely navigated to its landing pad. The lander’s body, physics and simulation dynamics can be manipulated via the context features. Influence of context settings on an agent trained on the default environment:
Context Feature |
Default |
Bounds |
|---|---|---|
FPS |
50.0 |
(1, 500, <class ‘float’>) |
SCALE |
30.0 |
(1, 100, <class ‘float’>) |
MAIN_ENGINE_POWER |
13.0 |
(0, 50, <class ‘float’>) |
SIDE_ENGINE_POWER |
0.6 |
(0, 50, <class ‘float’>) |
INITIAL_RANDOM |
1000.0 |
(0, 2000, <class ‘float’>) |
GRAVITY_X |
0.0 |
(-20, 20, <class ‘float’>) |
GRAVITY_Y |
-10.0 |
(-20, -0.01, <class ‘float’>) |
LEG_AWAY |
20.0 |
(0, 50, <class ‘float’>) |
LEG_DOWN |
18.0 |
(0, 50, <class ‘float’>) |
LEG_W |
2.0 |
(1, 10, <class ‘float’>) |
LEG_H |
8.0 |
(1, 20, <class ‘float’>) |
LEG_SPRING_TORQUE |
40.0 |
(0, 100, <class ‘float’>) |
SIDE_ENGINE_HEIGHT |
14.0 |
(1, 20, <class ‘float’>) |
SIDE_ENGINE_AWAY |
12.0 |
(1, 20, <class ‘float’>) |
VIEWPORT_W |
600.0 |
(400, 1000, <class ‘int’>) |
VIEWPORT_H |
400.0 |
(200, 800, <class ‘int’>) |
CARL VehicleRacing Environment¶
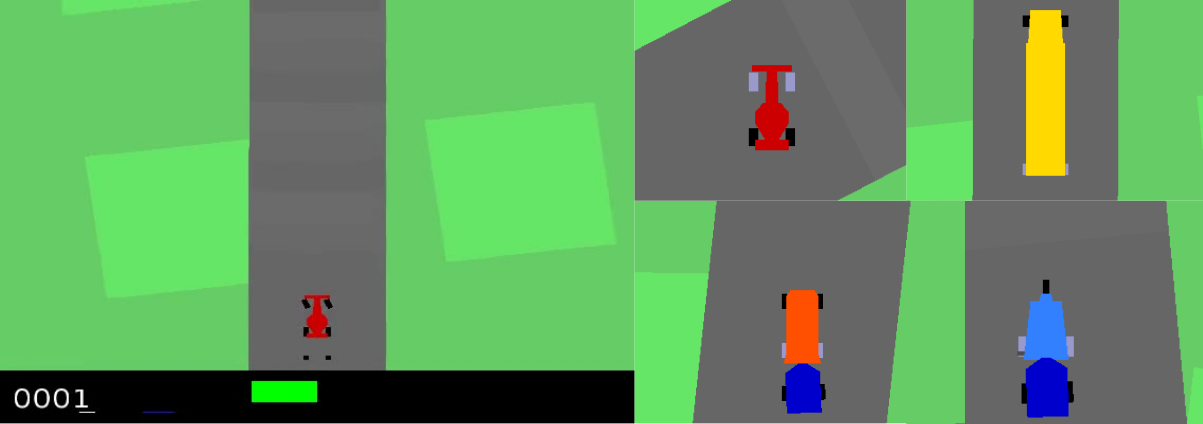
In this environment a vehicle is raced around a track. The context here is the type of vehicle. There are different types of vehicles, race car, street car, bus and vehicle, and most of them can have a front-, back- or all-wheel drive as well as small or large trailers (29 variations in total).
Context Feature |
Default |
Bounds |
|---|---|---|
VEHICLE |
0 |
|